with azbil
豆知識
フィードフォワード制御
フィードフォワード制御とは、システムの状態を予測することで、誤差が発生する前に制御量を決める制御方式です。この方式では、制御対象に変化が生じる前に、予測可能な範囲で外部の変動要因(外乱)を検知し調整を行うことができます。その結果、誤差が発生する前に対処することが可能となり、外乱に対して迅速に反応することができるため、制御の精度が向上し、システムの応答速度も速くなります。 制御方式の中で、もう一つ重要な役割を果たすのがフィードバック制御であり、制御対象の測定値と目標値との差(偏差)を計測し、その差に基づいて制御量を決める制御方式です。フィードフォワード制御とフィードバック制御は、いずれも制御システムにおいて欠かせない要素となっています。
しかし、フィードフォワード制御は予測が正確であれば高い制御精度を実現し、システムの応答速度も速い一方で限界もあります。予測が不正確である場合や、システムに影響を及ぼす外部の変動要因が予測できない場合には効果的に機能しないことがあるのです。このため、フィードフォワード制御はフィードバック制御と組み合わせて活用されることが一般的です。
図はフィードフォワード制御の仕組みを表したものです。フィードバック制御のようにループを形成せず、信号の流れが一方向に進むため、開ループ制御とも呼ばれています。
フィードフォワード制御系の仕組み 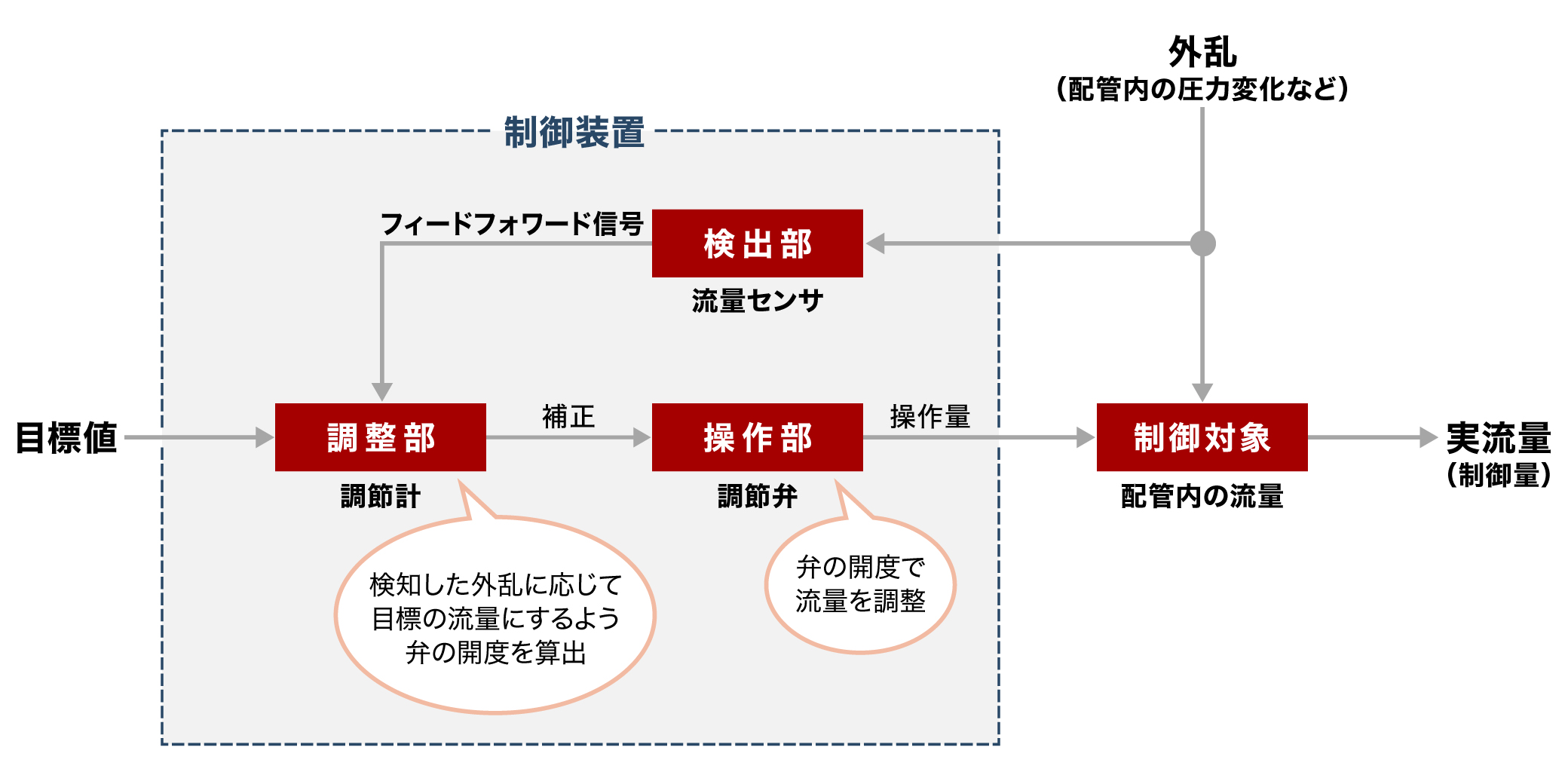
フィードフォワード制御は、様々な分野で活用されています。フィードフォワード制御を使った具体的な例をいくつか紹介します。
- ① 空調設備などの温度制御システム
空調設備における温度制御システムでは、外部の気温変化、室内の人の活動量(発熱)などが外乱となり、室内温度に影響を与えます。フィードフォワード制御を活用することで、外部温度や人の活動を予測し、空調システムの出力を事前に調整することが可能となり、室温の急激な変化を抑え安定した室内環境を保つことができます。 - ② ロボットアームの位置制御システム
ロボットアームの位置制御システムでは、機械の動作中に外部から加わる力やトルク(荷重や振動)によって、アームの位置が変動することがあります。フィードフォワード制御を活用することで、荷物や外部の力を事前に予測し、アームの動作を補正することができます。 - ③ 電気瞬間湯沸かし器の温度制御システム
電気瞬間湯沸かし器における温度制御システムでは、給水や水圧の変動、使用中の流量の変動などが外乱となり出湯温度に影響を与えます。現在の水温や流量などの入力情報を事前に利用してフィードフォワード制御を活用することで、ヒーター出力を調整することが可能となります。これにより短時間で適切な温度のお湯を供給することができます。
このようにフィードフォワード制御によって、制御自体の精度が向上し、システムの応答が迅速になることで、より効率的かつ、環境にも優しい制御が実現しているのです。
(監修:東京理科大学 創域理工学部 教授 野口 昭治 氏)
 関連情報
関連情報


