位相型回折格子を用いた光学式測距技術の開発
キーワード:非接触距離計測,三角測量法課題解決,正反射影響低減,安定計測, 位相型回折格子,ラテラルシアリング干渉計,波面,縞周波数,解析信号
光学式非接触距離計測法の1つである三角測量法が持つ課題を解決する測距技術を開発した。本技術は測定対象からの拡散反射光の波面を位相型回折格子により2分岐させ,発生する干渉縞を受光素子で受光し,干渉縞空間周波数から波面の曲率半径,すなわち測定対象までの距離を求める技術である。本技術は三角測量法と比べ,曲面や凹みなど測定対象の形状に強いことが特長である。また,測定対象からの強い正反射光による影響を低減している。評価サンプルとして金属ピンゲージの形状を,三角測量法と今回開発した方法で測定し,実効性を確認した。
1.はじめに
産業分野での測定対象の位置や形状を測定するためのセンサとして,光を用いた非接触型の測距センサが多く使用されている。それら光を用いた測距センサの中で代表的な計測法には,三角測量法が挙げられる。三角測量法は測定対象にスポット光を照射し,測定対象からの反射光の位置を受光素子で検出し,測定対象との距離によって反射光が受光素子に入射する位置が変わるという原理を利用して測定対象までの距離を測定する方法である。三角測量法では測定対象にスポット光を照射する角度と,測定対象からの反射光を検出する角度が異なるため,測定対象の形状や設置する向きによって光線が測定対象に遮られ(これを「オクルージョン」と称する),測定できないという課題がある。例えば測定対象が図1に示すような凸形状であった場合,測定可能な向きと測定不可能な向きがある。一方この課題を解決するために,従来同軸光学系を利用した様々な光学式測距法が提案されているが,いずれの方法も光学系が複雑になる(1)。
このオクルージョンによる測定不能領域が発生する課題を解決できる一方法として,位相型回折格子を用いた光学式測距技術を開発した。この技術はオクルージョンを発生せず安定した測定ができるとともに,シンプルな構成であることを特長とする。
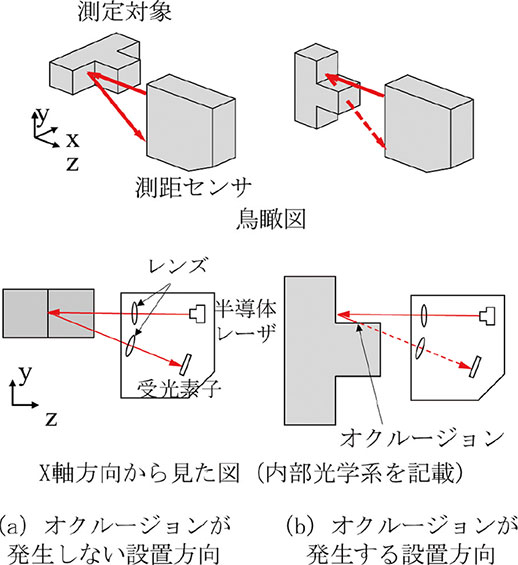
図1 三角測量法でのオクルージョン説明図
この光学式測距技術を用い,サンプルとして用いた金属ピンゲージの方向を変えてピンゲージ円柱曲面の形状測定を行い,どちらの向きでも安定した測定結果が得られることを確認した。
2.位相型回折格子測距法の計測原理
開発した位相型回折格子を用いた測距技術の計測原理を説明する。本方式における距離計測は,波面を利用する。測定対象に向けて光を照射すると,対象面での拡散反射光の波面は,ホイヘンスの原理に基づき球面状となり,測定対象から離れるに従い波面の曲率半径は大きくなる。この波面の曲率半径を求めることにより測定対象までの距離を測定する。一方,波面の曲率から距離を求める方法の1つとして,コノスコピックホログラフィー(2)がある。この方法は光源にレーザなどの単色光を用い,複数の複屈折結晶と偏光板を用いて測定対象からの拡散反射光を分岐させることにより発生するコノスコープ像の干渉縞周波数から,測定対象までの距離を測定する方法である。我々はさらにシンプルであり,量産性に優れた光学系を実現するため,この波面の曲率半径を求める方法として位相型回折格子(3)を使ったラテラルシアリング干渉計(4)測距技術を考案した。シアリング干渉計は被測定対象からの反射波面自身を干渉させる共通光路干渉計のため,振動や温度変化など外乱に対して安定な干渉計であり,工場などの生産現場での使用に適している。位相型回折格子とは回折格子の一方式であり,光の吸収のない平板の表面に周期的な溝や屈折率変化をつけた格子のことをいう。位相型回折格子は半導体プロセスやレプリカ複製法で製作できるため(3)量産性に優れる。位相型回折格子測距法は1枚の回折格子で拡散反射光を分岐し,干渉させることが可能なため,数少ない光学要素で構成されるシンプルな光学系で距離計測を実現することができる。
図2に位相型回折格子測距法の基本光学系を示す。半導体レーザからの光はレンズ\({L}_1\)で平行光になり,ビームスプリッタB.S.と対物レンズ\({L}_2\)で測定対象へ照射する。位相型回折格子で測定対象からの拡散反射光波面を2分岐させ,発生する干渉縞をリニアアレイセンサ等の受光素子で受光し,干渉縞の空間周波数から波面の曲率半径,すなわち測定対象までの距離を求める。干渉縞の空間周波数\(f\)と測定対象距離\(D\)(測定対象と\({L}_2\)レンズ主平面距離)の関係は,下記の式で求められる。
ここで\(F\)は\({L}_2\)レンズの焦点距離,\(L\)は\({L}_2\)レンズ主平面と受光素子の距離,\(Λ\)は位相型回折格子のピッチ,\(Δk\)は位相型回折格子で回折する2つの回折光の次数差で正の整数である。位相型回折格子を利用することにより,特定の2つの次数の光を回折させることができるため,明瞭な干渉縞を形成させることができる。さらに式(1)に表されるように,測定対象までの距離は光源の波長に依存しない特長をもつ。
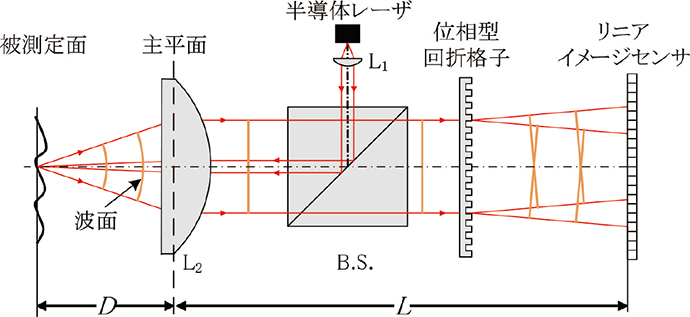
図2 位相型回折格子測距法の基本光学系
3.高分解能縞周波数解析法
干渉縞の空間周波数を求める方法の1つとして離散フーリエ変換が用いられる。しかし離散フーリエ変換の周波数分解能は受光素子の長さの逆数となるため,高い分解能で縞周波数を求めるには,長い受光素子を必要とし現実的ではない。そこで干渉縞信号を解析信号(5)で表現し,解析信号の瞬時位相の近似直線から位相変化を求める高分解能縞周波数解析法を開発した。干渉縞の解析信号を求める方法にはヒルベルト変換(6)や直交検波法があるが,本解析法では,位相情報に影響を与えない離散フーリエ変換と逆変換を応用する手法を用いた。
高分解能縞周波数解析法における信号処理のステップを下記に示す。
a) 干渉縞信号\(i(x)\)の離散フーリエ変換を行い,\(I(f)\)を求める。
b)\(I(f)\)の正の干渉縞の空間周波数成分のピーク周波数\({f}_0\)を求め,\(I(f)\)に\({f}_0\)の周辺の縞周波数成分のみを抽出するバンドパスフィルタをかけ,\({I}_p(f)\)を求める。
c) \({I}_p(f)\)を\({f}_0\)シフトさせ\({I}_p(f-{f}_0)\)を求める。これは,\({f}_0\)が局部発振器となるヘテロダイン検波における周波数変換と等価である。
d)\({I}_p(f-{f}_0)\)の逆フーリエ変換を行い,周波数変換された干渉縞の実部となる実信号\(i_{f0}(x)\)および虚部となる解析信号\(î_{f0}(x)\)を求め,\(i_{f0}(x)\)と\(î_{f0}(x)\)から\(x\)位置での位相,すなわち瞬時位相を求める。
e)瞬時位相の直線近似から求めた位相変化を,補正周波数\(fc\)に変換する。
f) \({f}_c\)を用いて\({f}_0\)を補正し,縞周波数を求める。
なお手順 c)の周波数変換は行わなくても縞周波数を求めることはできるが,位相飛び(7)が多くなり,位相接続ミスが起こりやすくなる。手順の概念図を図3に示す。
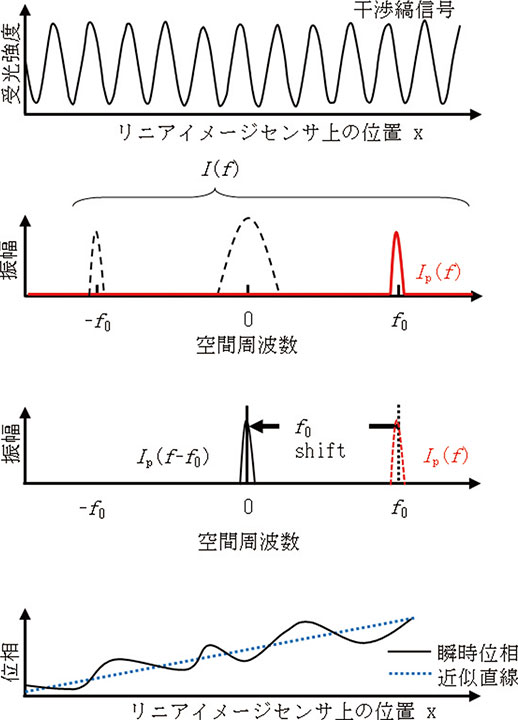
図3 高分解能縞周波数解析法の概念図
4.正反射光飽和対応アルゴリズム
測定対象の表面状態によっては,強い正反射光が受光素子の一部分へ入射し,過剰露光となって受光信号が飽和する場合がある。そのため,前章で説明した縞周波数解析をする際に,飽和した画素の瞬時位相が乱れ,ステップ e)において適切な近似直線を求めることができず,正しく縞周波数を求めることができない場合がある。そこで正反射光の影響を強く受けた干渉縞の周波数解析の前に,飽和した画素を除き,位相の直線近似を行うアルゴリズムを考案した。図4(1)に示すようにリニアイメージセンサ中央付近に強い正反射光があり,飽和を起こした場合の解析方法について説明する。
まず図4(2)に示すように正反射光による受光信号の飽和がない領域(両端部分と呼ぶ)のみを用いて解析を行う。それぞれで前章に示した a)~d)の信号処理で瞬時位相を求める。このとき両端部分の位相は本来連続しているため,図4(3)に示すように左部分のみの瞬時位相から近似直線を求め,その近似直線との差分が最小になるように右部分に2nπ (n:整数)を加えることで,位相接続を行う。その後,離れた両端の位相を用い,前章の e)~f)の信号処理を行うことにより干渉縞の周波数を求める。
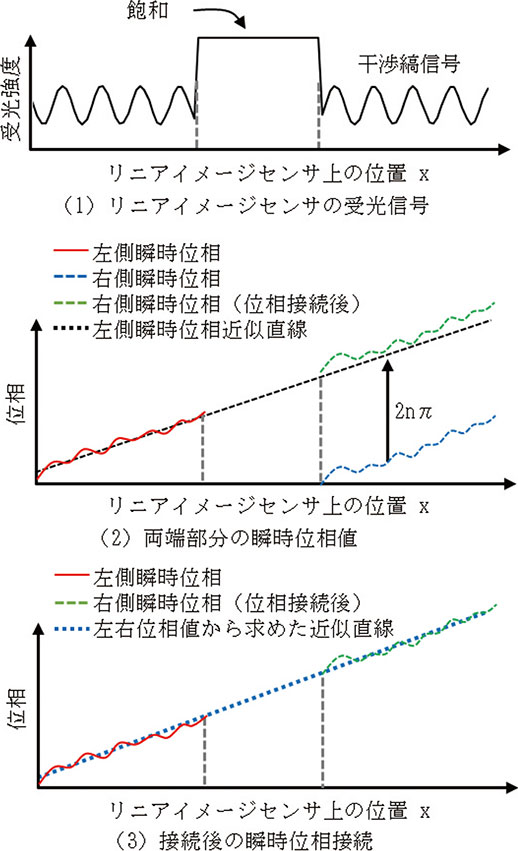
図4 飽和した正反射光解析法説明図
5.評価実験
開発した位相型回折格子測距法の精度検証および,三角測量法でのオクルージョンの影響を比較するために,サンプルとして円柱形状である金属ピンゲージを用い評価した。金属ピンゲージの径精度(許容差)は±0.8µm,表面粗さは(Ra)0.2µmである。
位相型回折格子測距法での評価光学系とピンゲージ配置は,図5(a)に示すx軸方向に走査させて測定する(以下「x方向走査」とする)評価と,z軸を中心にピンゲージを90°回転させ,y軸方向に走査させながら測定する(以下「y方向走査」とする)評価を行った。ピンゲージは20µmステップで走査させた。三角測量法はセンサを図5(b)に示すように,投受光軸を含む面をyz平面と同一になるように設置し,位相型回折格子測距法と同じ評価を行った。
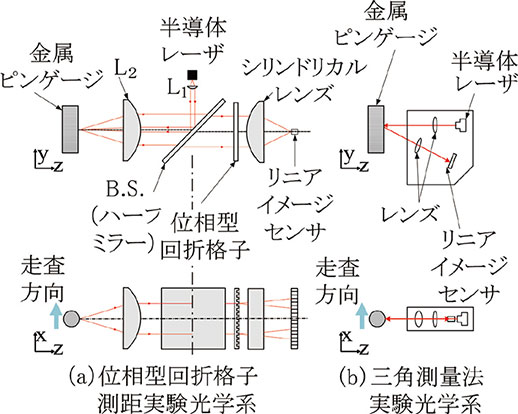
図5 評価における測定対象と各光学系の方向(x方向走査)
6.評価結果と考察
三角測量法を用いたときのピンゲージの形状測定結果を図6に,位相型回折格子測距法での形状測定結果を図7に示す。参考として,ピンゲージφ5の円柱を理想円と仮定して,黒破線として付記した。なお,ピンゲージ位置0.0mmでの面の法線角度を0°とし,正のピンゲージ位置の法線角度をプラス,負のピンゲージ位置の法線角度をマイナスと定義して以下説明する。
三角測量法の計測可能角度領域は,x方向走査では155°であり,理想円とほぼ一致した測定値が得られているが,y方向走査の場合62°であった。24°以下(ピンゲージ位置1.0mm以下)で,測定値が大きく乱れている領域や,測定値を出力しないデータ欠損領域があることがわかる。
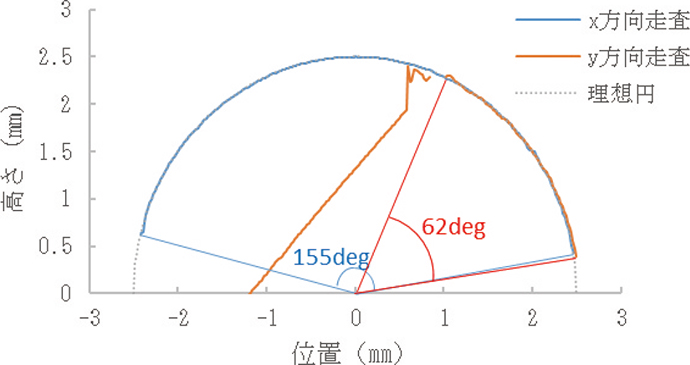
図6 三角測量法でのピンゲージ測定結果
この測定値の乱れや欠損については下記の3つの角度領域によって異なる原因が考えられる。
-40°以下(ピンゲージ位置-1.62mm以下)の領域:光学系とピンゲージの配置の関係により,オクルージョンが発生している。この領域は測定値が乱れているが,これはピンゲージの被照射面からの強い正反射光が,レンズや筐体内壁面等で反射・散乱し,光学設計と異なる方向から受光素子に入射する迷光が生じたためと考える。
-40~13°(ピンゲージ位置-1.62~0.56mm)の領域:オクルージョンは発生していないので,正しい値を出力すべき領域であるが,測定値が乱れている。これはピンゲージの被照射面からの強い正反射光が迷光となって受光素子へ入射し,被照射面からの光よりも大きいため誤出力したことが原因と考える。
20~24°(ピンゲージ位置0.86~1.00mm)の領域:この角度領域では測定値が欠損している。ピンゲージの被照射面からの正反射光が強く,受光素子が過剰露光による飽和を起こし,正確に解析できないためであると考える。
位相型回折格子測距法の計測可能角度領域は,図7に示すようにx方向走査では160°,y方向走査では153°であった。
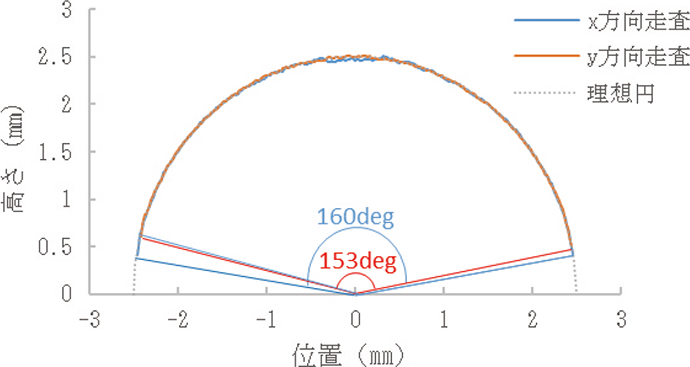
図7 位相型回折格子測距法での測定結果
次に三角測量法と位相型回折格子測距法の測定精度比較結果を表1に示す。精度評価は金属ピンゲージを理想曲面(真円)とした値と測定値との差分をとり,その標準偏差を精度の評価指標とした。
三角測量法のx方向走査は正反射光の影響を受けない方向の測定であるため,精度が7.9µmと安定した測定値を得た。他方y方向走査では前述した測定データの欠損領域が多く,精度比較にはデータ点数が不十分なためN/Aと記載した。
表1 各測定法の精度比較
| 精度(µm) | ||
|---|---|---|
| x方向走査 | y方向走査 | |
| 三角測量法 | 7.9 | N/A (測定データ欠損領域あり) |
| 位相型回折格子法 | 14.2 | 8.2 |
位相型回折格子測距法でのy方向走査での精度は8.2µmであった。正反射の影響を受けない三角測量法のx方向走査とほぼ同等の精度を得られた。ピンゲージからの正反射光が受光素子に入射する位置0mm付近も測定できており,正反射光飽和対応アルゴリズムが有用であることがわかる。位相型回折格子測距法のx方向走査の測定精度は14.2µmであり,y方向走査での精度より73%大きい。図7の測定結果のグラフより,x方向走査の測定において,位置0mm付近で測定値に小さな変動が見られる。この測定値の変動の原因を探るため,ピンゲージ位置0mmでのリニアイメージセンサ出力データを取得した。x方向走査,y方向走査でリニアイメージセンサ出力値分布を図8示す。
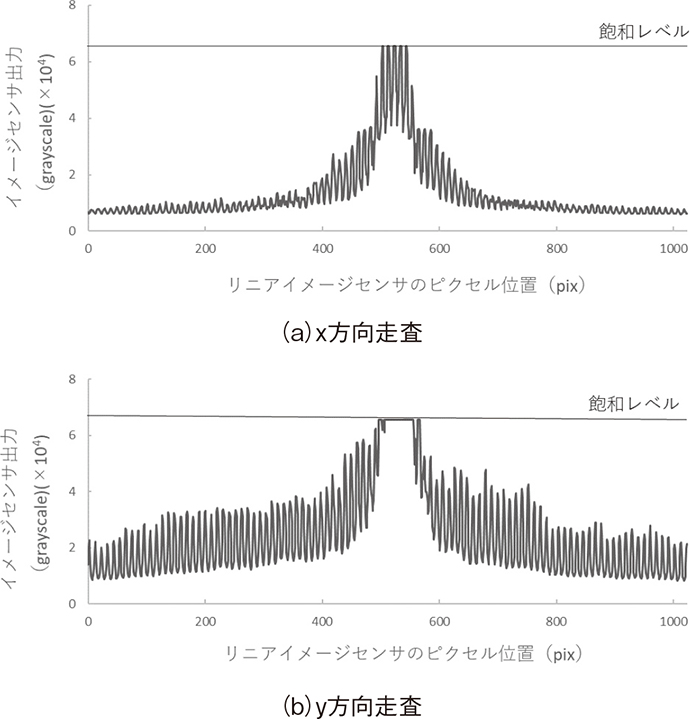
図8 金属ピンゲージ位置0mmでのリニアイメージセンサ出力分布
図8の出力分布よりx方向走査,y方向走査ともにピンゲージの正反射光がリニアイメージセンサの中心付近に入射して,受光強度が大きくなっていることを確かめた。y方向走査では中心付近の信号が完全に飽和しており,正反射光飽和対応アルゴリズムを適用しているが,x方向走査では正反射光は部分的に飽和するレベルの干渉縞信号を観測した。この部分的な飽和が干渉縞の周波数乱れを引き起こし,誤差が大きくなったと考える。x方向走査での正反射強度がy方向走査の正反射光強度に比べ大きくない理由は,金属ピンゲージ表面の曲率により,リニアイメージセンサ上に正反射光が分散するためである。さらに,正反射光が入射する位置もy方向走査では常にリニアイメージセンサの中心付近になるが,x方向走査では正反射光の位置が走査位置によってリニアイメージセンサ上を移動するため,正反射光飽和対応アルゴリズムを適用するには改良を必要とする。
以上の結果から,三角測量法でオクルージョンが発生する走査方向の場合,測定できない部分がある一方で,位相型回折格子測距法では,一部で誤差が大きくなるものの,走査方向に依存せず安定して測定できることがわかった。
7.おわりに
位相型回折格子測距法を開発し,金属ピンゲージを用いて三角測量法による測距センサとの比較評価を行った。三角測量法ではx方向走査では155°の角度領域で精度7.9umが得られたが,y方向走査では,オクルージョンと迷光による強い正反射光により測定値が乱れ,データ欠損する角度領域があった。他方,我々が開発した位相型回折格子測距法ではx方向走査では160°に渡り精度14.2µm,y方向走査では153°に渡り精度8.2µmを得て,安定した測定値を得ることができた。
本方式は測距に着目しているが,幅広い計測にも適用できる可能性を持つ。今後,適用の範囲を検討しつつ,直面する様々な課題解決へ応用していく予定である。
<参考文献>
(1) 吉澤徹 最新光三次元計測, 2007, 第2刷, pp.6-9, 朝 倉書店.
(2) G Sirat and D Psaltis,“Conoscopic holography”, Opt.Lett.,1985,vol.10,No.1, pp.4–6.
(3) J Turunen and F Wyrowski, Diffractive Optics for Industrial and Commercial Applications, 1997. Akademie Verlag.
(4)D Malacara,Optical Shop Testing,2007,3rd ed., pp.124–184,Wiley.
(5)J W Goodman,Statistical Optics,2015,2nd ed., pp.98–100, Wiley.
(6)A V Oppenheim and R W Schafer, with J R Buck, Discrete-Time Signal Processing,1999, 2nd ed., chapter 11, Prentice-Hall.
(7)K Creath, “Phase-measurement interferometry. techniques”, Progress in Optics, E. Wolf (Eds.), 1988, vol. 26, pp.349–393, Elsevier.
<著者所属>
藤原 久利 アズビル株式会社 技術開発本部センシングデバイス技術部
古谷 雅 アズビル株式会社 技術開発本部センシングデバイス技術部
藤井 絵理 アズビル株式会社 技術開発本部センシングデバイス技術部
この記事は、技術報告書「azbil Technical Review」の2022年04月に掲載されたものです。
- 2026年発行号
- 2025年発行号
- 2024年発行号
- 2023年発行号
- 2022年発行号
- 巻頭言:計測の信頼性確保に不可欠な計量標準
- 特集に寄せて
- 正しく測るための社内基盤整備
- 高度に安定した校正環境を実現する新校正施設
- 液体流量計の開発と品質管理のための標準供給体制構築
- 膨張法による高精度真空標準の確立
- 安定した湿度校正を実現する低露点発生装置の開発
- 市場要求に応える気体大流量の標準供給体制構築
- 燃焼安全ソリューションで実現する改正JISに適合した設備対応
- 小型で環境に配慮したフィルタ付き減圧弁の開発
- 位相型回折格子を用いた光学式測距技術の開発
- 組込機器にて最新情報技術を活用可能とするプラットフォームの実現
- 繋ぐ・調べる・動かすを1つに凝縮したスマートHARTモデムの開発
- 小規模ビルのエネルギー管理に貢献するビル管理システム SmartScreen2
- 2021年発行号
- 2020年発行号
- 2019年発行号
- 2018年発行号
- 2017年発行号
- 2016年発行号
- 2015年発行号
- 2014年発行号
- 2013年発行号
- 2012年発行号
- 2011年発行号
- 2009年発行号
- 2008年発行号
- 2007年発行号
- 2006年発行号