オンライン異常予兆検知システムの大規模プラント向け拡張機能の開発
キーワード:AIによる異常予兆検知,時系列クラスタリング,スパースモデリング
多くの製造業では,安全や安定操業のために異常検知システムの導入が進んでいる。最近では,異常予兆が検知できるかどうかという導入フェーズから,維持管理を効率的に行えるかという運用フェーズへと移行してきている。特に大規模なプラントを対象とした場合,多数の監視モデルを構築・配備する必要があるなどの課題が存在する。そこで,プラントを網羅的に監視し変調を検知するとともに,変調の原因となった変数を監視する新たなモデル構築を支援する技術を開発した。これにより,異常検知システムのモデル構築や運用を効率的に行えるようになる。
1.はじめに
近年,カーボンフリーに代表されるように持続可能な社会の実現が企業活動に求められるようになってきた。国内に目を向けると少子高齢化,公共インフラの老朽化,働き方改革,ジェンダー平等など社会や企業が取り組むべき課題が山積している。これらの持続可能な社会の実現と心的豊かさの実現には,企業活動の飛躍的な生産性向上と場所や個人の属性に関係なく行動できる環境の実現が急務である。
アズビルでは,DXのバックボーンとなる新たなオートメーションとして「自律化システム」により,これら社会課題の解決を目指している。自律化システムとは,システムが能動的にPDCA(計画,実行,評価,対策・改善)サイクルをまわし目標達成を目指すものである。生産領域での自律化システムのファーストステップとして,アズビルが開発販売しているAIを活用したオンライン異常予兆検知システムBiG EYES™では,障害発生の予測や予知により,トラブル回避やその影響を最小化する役割を担っている。
BiG EYESの展開を進める中で,異常予兆検知システムにおけるお客様の関心は導入のフェーズ(異常予兆ができるかどうか)から,運用のフェーズ(いかに維持・管理を効率的に行えるか)へと移行してきているととらえている。製造現場の担当者がこのようなAIモデルを維持・管理していくことは負担となることが多いが,この維持・管理が適切に行われないと信頼に足る異常予兆検知ができなくなり,徐々に現場では異常予兆検知システムが使われなくなってしまう。
本稿では,連続プロセス向けBiG EYESを大規模プラントへ適用する際の課題を述べ,その課題解決として開発した技術TCAS(Time-series Correlation Analysis using Sparse precision matrix)と,それを搭載した連続プロセス向けBiG EYESのオプション製品であるBiG EYES plus™について報告する。なお,本開発は関西電力株式会社と共同で実施された。
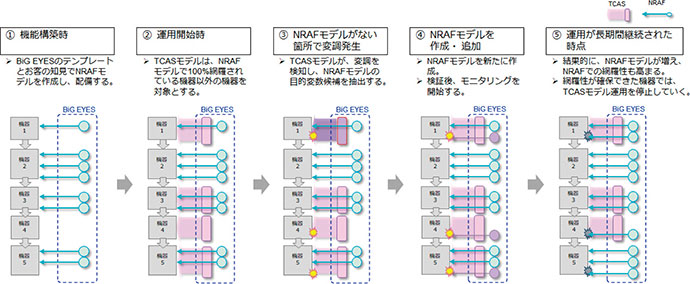
図1 TCASモデルの役割とライフサイクル
2.大規模プラントにおけるNRAFモデリングの課題
連続プロセス向けBiG EYESにはNRAF(Nonlinear Regression Analysis using FNN,FNN:Fuzzified Neural Network)が採用されている(1)。NRAFでは,目的変数と説明変数との関係をFNNによる非線形重回帰により学習し,目的変数の推定値と実測値との乖離度合いに基づいて異常予兆を検知する。具体的には,異常発生時に一番初めに影響が現れる変数を目的変数(例えば温度)とし,制御的あるいは物質収支的など関連する周辺の変数(流量,弁開度など)との関係を現場の知見を基にモデリングする。
このようにして作られる回帰モデルは精度高く異常予兆検知が可能である一方,目的変数と説明変数の関係はプラント全体でみると局所的な関係を捉えているにすぎず,プラントの規模が大きくなると多数の監視モデルを構築・配備する必要がある。そのためには多大な工数を要するだけでなく,未知の異常に対しては目的変数の設定が難しい場合がある。また 当然ながら監視モデルを配備していない箇所の異常は検知することができないという課題がある。
そこで,NRAFほどの高精度なモデルではない代わりに,プラントを網羅的に見張り変調を捉えることを考える。なお,本稿で「変調」とは,異常とは断定はできないものの,想定された正常状態とは異なる状態を指すものとする。また,その変調を引き起こした変数を抽出し,それを目的変数として新たなNRAFモデルを構築することを考える。これにより,システムの導入当初は重要な箇所にNRAFモデルを配備し,NRAFモデルで網羅できていない機器に対してはTCASモデルを配備した状態で監視運用をスタートする。運用開始後,TCASモデルにて変調を検知し,抽出された目的変数候補からNRAFモデルを拡充していくことで,継続的にプラント全体の網羅的で強力な監視へと繋げていく運用が可能になる(図1)。
3.TCAS
3.1 概要
前章で述べたようにプラントを網羅的に監視する場合,事前に全ての異常を想定してAIモデルに学習させることは現実的ではなく,未知の異常を含め,これまでとは異なる状態を検知することが求められる。
そこで,正常な状態を基準状態として規定しそこからの距離を測るような,教師なし学習のアプローチを取るのが妥当と考えられる。例えば,ホテリングのT2(2)やMT法(3)などのような,マハラノビス距離を求めるものがある(4)。しかし,このような方法を採用するにあたっては以下に述べる2つの課題が存在する。
1つ目の課題は,基準状態をどのように決定するかである。通常プラントには運転状態によって複数の正常状態がある。そのため複数の基準状態を考える必要がある。この違いを無視して単一の正常状態を基準とすると極めて検知性能の低いモデルとなってしまう。一方,運転状態ごとに基準を作る場合,学習用のデータを複数の運転状態ごとに切り出して準備する作業を人手で行うのは,非常に負担が大きいという課題がある。この課題に対しては,時系列データのクラスタリングを行い自動的に複数の運転状態ごとの学習データを切り出すことを考える。
2つ目の課題は,センサのノイズの影響にどのように対応するかである。プラントで計測・収集されるデータには少なからずノイズが含まれており,このノイズによって変数間の相関構造が容易に崩れることが知られている(5)。マハラノビス距離は変数間の相関を考慮した距離であるため,ノイズの影響を大きく受けることになる。参考文献(5)では,Graphical Lasso(6)というスパース構造推定を用い,本質的な相関構造を推定することでこの問題を解決している。
そこで,これら2つの課題を解決するために,TCASではスパース構造推定と時系列クラスタリングを同時に行えるTICC(Toeplitz Inverse Covariance-based Clustering)(7)というアルゴリズムを採用した。TICCにおけるクラスタリングは,スパース構造推定によって得られた精度行列(分散共分散行列の逆行列) を用いて多変量正規分布の尤度(ゆうど)を求め,各サンプルがどのクラスタに所属するかを動的計画法(DP:Dynamic Programing)によって求める。クラスタリングが行われると,クラスタごとにスパース構造推定を行い疎な精度行列を求める。以上のクラスタリングとスパース構造推定を繰り返し計算し,クラスタメンバが収束するまで実行するアルゴリズムである(図2)。
TICCによって得られた精度行列を用いて各サンプルが所属するクラスタからのマハラノビス距離を求め,所定のしきい値を上回ると変調と判断する。変調が検知されると,その変調に影響を与えた変数を求める。TCASではS/N比と,KL距離に基づく手法の2つの方法で変調を引き起こした変数を求めており,この変数をNRAFモデルの目的変数候補として出力する。
以下の節では,TCASの主要な機能である変調を検知する処理と,その変調を引き起こした変数を求める処理について述べる。
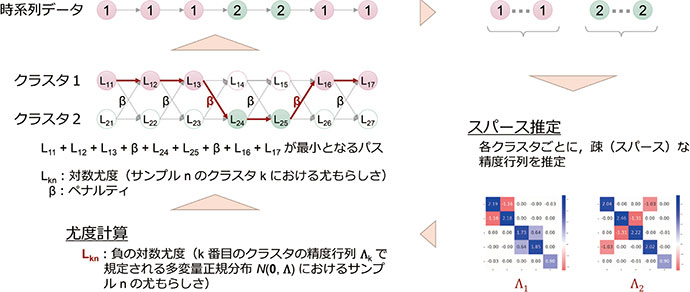
図2 TICCの動作
3.2 変調の検知
(1)学習時
TCAS学習時のフローは以下の通りである。正常データ時系列に対し,TICCを用いてクラスタリングを行い,各クラスタの精度行列を取得しておく。この際,あらかじめクラスタ数を指定しておく必要がある。次に,学習データの各サンプルに対して所属するクラスタの精度行列を用いてマハラノビス距離を取得する。
ここで\(MD^{(n)}\)は\(n\)番目のサンプル\(x^{(n)} \in \mathbb{R}^p \)に対するマハラノビス距離,\(μ \in \mathbb{R}^p \)は平均ベクトル,\(Λ \in \mathbb{R}^{p×p} \)は精度行列である。なお,ここでのマハラノビス距離は変数の数(次元)によらず同程度の値となるよう変数の数\(p\)で除していることに注意されたい(MT法での定義)。
得られたマハラノビス距離の分布からそのクラスタにおけるしきい値を決定する。決定方法は,最大値やパーセンタイル値(たとえば99.99%)など,検知の感度設定に応じて決定される。
(2)オンライン監視時
オンライン監視時は,学習済みのTICCモデルを用いて新たなサンプルがどのクラスタに所属するかを推定する。そして,そのクラスタの精度行列を用いてマハラノビス距離を算出ししきい値と比較することで変調を検知する。
3.3 目的変数候補の抽出
検知された変調に対し,それを引き起こした寄与度の高い変数を求めることで,NRAFの目的変数の候補となることが期待できる。TCASではS/N比とKL距離の2種類の手法によって変調に対する各変数の寄与度を算出し,その上位3つの変数を目的変数候補として抽出する。S/N比では比較的短時間の変化を見ることができ即応的であるのに対し,KL距離はデータの蓄積が必要ではあるものの分布間の比較によって統計的に相関構造の変化を捉えることが可能となる。
3.3.1 S/N比
MT法における項目(変数)選択の手法として知られているもので,2水準の直交表に従って使用する変数の組み合わせを複数変えてマハラノビス距離を算出し,望大特性のS/N比を計算する。次に,変数ごとにその変数を使用している組み合わせでのS/N比の平均を求めることで,その変数の影響度合いを求めることができる(8)。
ここで\(\overline{η}_i\)は\(i\)番目の変数の平均S/N比,\(S_i\)は\(i\)番目の変数が含まれる組み合わせの集合,\(\vert S_i \vert\)は組み合わせの数,\(η_s\)は\(s\)番目の組み合わせにおけるS/N比,\(N_{sn}\)はS/N比算出のために使用されるサンプル数,\(MD^{(n)}_s\)は\(s\)番目の組合わせにおける\(n\)番目のサンプルのマハラノビス距離を示す。
3.3.2 KL距離
TICCの学習によって得られた精度行列を用いて多変量正規分布を規定することができる。当該クラスタの正常時の分布と,変調が起きているときの分布の2つの分布を考える。変調が起きているときの分布は,適当なサンプル数に対してクラスタ数1のTICCを用いてスパース推定し精度行列を求める。KL(Kullback-Leibler)距離は分布間の距離としてよく用いられるものの1つである。特定の変数に着目した場合,KL距離の期待値を求めることで,各変数の異常に対する寄与度を与えることができる(5)。
2つの確率分布,\(p_A{(x)}\)と\(p_B{(x)}\)の間において,\(i\)番目の変数\(x_i\)に着目すると,KL距離は以下のようになる。
ここで\(z_i\)は\(x_i\)を除いた残りの変数を表す。KL距離は数学的に厳密な意味では距離ではなく対象性が無いため,AとBを入れ替えた\(KL_i^{BA}\)を求め,最大値を寄与度として採用する。
4.BiG EYES plus
前章で述べたTCASを搭載したBiG EYES plusを開発した。本章では,BiG EYES plusの概要と,実データを用いて検証を行った例を示す。
4.1 概要

図3 BiG EYES plusシステム構成
BiG EYES plusは連続プロセス向けのオプション製品であり,BiG EYESと連動し,より広範なモニタリングとNRAFモデル構築の効率化を実現する。BiG EYES plusもBiG EYESと同様にサーバ,ビューア,コンフィギュレータの3モジュールで構成される(図3)。
コンフィギュレータはサーバに対し監視機能を定義するツールであり,データ収集からモデル構築,評価までの一連の作業環境を提供する。サーバはデータベースから操業データを取得し,TCASの学習,評価値の算出を実行し変調の有無を判定するとともに変調の原因となった変数の抽出を行う。ビューアは変調をユーザーに伝えるGUI(Graphical User Interface)であり,変調検知時にアラームを発報する他,マハラノビス距離のトレンド表示や変調原因の変数上位3つをそれぞれ表示する(図4)。異常予兆検知モデルの管理者は,ここで挙げられた変数を確認するとともにプロセスの知見を踏まえて目的変数を選択し,新たなNRAFモデルを構築することができる。
4.2 検証例
火力発電プラントの実データを用いてオフライン検証を行った結果について述べる。重原油ポンプの軸受が損傷したことによりポンプの振動や軸受温度が上昇し,DCSの警報によりオペレータが気づいた事例である。
正常時のデータをクラスタ数5で学習を行い,目視により適切に運転状態がクラスタに切り分けられていることを確認した。

図4 ビューア画面での変調原因変数の表示
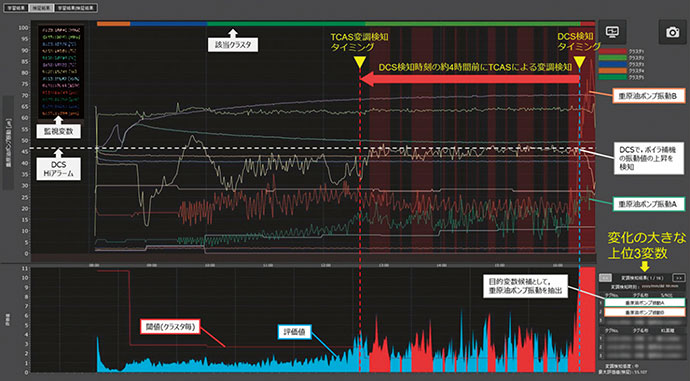
図5 実データ検証時のBiG EYES plus画面
このモデルを用いて,上記異常が発生した付近のデータで検証した結果が図5である。画面上部のカラーバーにおいて,その時点がどのクラスタに属しているかを確認することができる。画面中央部にて,監視変数のトレンドグラフを確認できる。画面下部にて評価値を表示しており,クラスタごとに自動決定されたしきい値を一定時間(設定変更可能)連続で超えた際にアラーム(評価値が赤色に変化している箇所)で変調を検知したことをユーザーへ通知する。オペレータがポンプ振動や軸受温度上昇のDCS警報により気がついた時刻に対し,TCASが約4時間前に変調を検知できていることが分かる。また,変調の原因となった変数として,プロセス知見と合致するポンプの振動値を正しく抽出することを確認できた。その他,エンドユーザーである関西電力の実データを用いて様々な故障モードに対する検証を行った結果,TCASはオペレータによる異常発見タイミングと比べ,数時間から数日以上早く変調を検知でき,有用性を確認できた。
5.おわりに
本稿では,連続プロセス向けに新たに開発した変調検知手法TCASについて述べた。本手法は,複数の正常状態とセンサのノイズの影響を考慮し,プラントを網羅的に監視することができるという特徴を持つ。さらに,クラスタリングによって複数の正常状態の時系列データを自動的に切り出したり,変調を引き起こした変数を目的変数として新たにNRAFモデルを構築するフローを支援したりと,エンジニアリング作業やモデルの維持・管理といった異常検知システムの運用への寄与が期待できる。
今後は,ユーザーからのフィードバックを受けてより使いやすく効率的な運用が行えるような機能改善を行っていきたい。例えば,現在は人が設定する必要があるクラスタ数などのハイパーパラメータの入力をなくし,自動あるいは半自動で決定できるような機能追加が考えられる。引き続き,BiG EYESが「安心・快適」で,自律的な生産空間の実現に貢献する製品として成長することで,より幅広い製造業で利用され,ユーザーの心的豊かさと持続可能な社会の実現の一助となれば幸いである。
<参考文献>
(1) 木村 大作,山縣 謙一:IoT時代のスマート設備管理を目指す操業ビッグデータを活用したオンライン異常予兆検知システムの開発,azbil Technical Review,2016年4月号,pp.9-15, アズビル株式会社
(2) H. Hotelling:Multivariate Quality Control Illustrated by Air Testing of Sample Bombsights,Techniques of Statistical A nalysis, 1947, pp.111-184, McGraw-Hill
(3) 立林和夫, 手島昌一, 長谷川良子:入門MTシステム,2008, pp. 53- 57, 日科技連出版社
(4) 井手 剛:入門 機械学習による異常検知,2015年,コロナ社
(5) 井手 剛:疎な相関グラフの学習による相関異常の検 出,人工知能学会第二種研究会資料,2009,2009巻,DMSM-A803号,p.04-
(6) J. Friedman,T. Hastie,and R. Tibshirani:Sparse inverse covariance estimation with the graphical lasso,Biostatistics,2008,9,pp. 432- 441
(7) D. Hallac,S. Vare,S. Boyd,and J. Leskovec: Toeplitz Inverse Covariance-Based Clustering of Multivariate Time Series Data,Proc. ACM SIGKDD,2017
(8) 田口玄一:品質工学講座3 品質評価のためのSN比,1988,日本規格協会
<商標>
BiG EYESはアズビル株式会社の商標です。
BiG EYES plusはアズビル株式会社の商標です。
<著者所属>
青田 直之 アズビル株式会社 AIソリューション推進部
川瀨 健 アズビル株式会社 アドバンスオートメーションカンパニー 戦略事業開発3部
日暮 優 アズビル株式会社 アドバンスオートメーションカンパニー 戦略事業開発3部
小川 勇磨 関西電力株式会社 火力事業本部 火力開発部門
藤原 圭佑 関西電力株式会社 火力事業本部 火力開発部門
この記事は、技術報告書「azbil Technical Review」の2024年04月に掲載されたものです。
- 2026年発行号
- 2025年発行号
- 2024年発行号
- 巻頭言:期待
- 特集に寄せて
- DR・VPPのためのリソース割当計画の自動作成
- 新技術を「試し」「議論し」「育てる」ための新実験棟
- 予兆検知・診断技術の開発
- オンライン異常予兆検知システムの大規模プラント向け拡張機能の開発
- 生成AIのアプリケーションへの導入に向けて
- オフィスのABW実装による効果検証法
- SUBLIME: Single-use battery-less wireless temperature sensor for lyophilization process
- 赤外線アレイセンサシステムの開発
- 生産性向上の実現に向けたIO-Link™対応誘導形近接センサ用ICの開発
- savic-net™G5コンパクトモデル
- 空間の価値を高めるsavic-net™ G5 入退室管理システム
- 小型デジタル指示調節計
- 2023年発行号
- 2022年発行号
- 2021年発行号
- 2020年発行号
- 2019年発行号
- 2018年発行号
- 2017年発行号
- 2016年発行号
- 2015年発行号
- 2014年発行号
- 2013年発行号
- 2012年発行号
- 2011年発行号
- 2009年発行号
- 2008年発行号
- 2007年発行号
- 2006年発行号