コンテナ化技術を活用したsavic-net™ G5システムの 仮想化基盤技術の開発
キーワード:デジタルツイン,現場品質の向上,savic-net™ G5
アズビルのビルディングオートメーションシステム(savic-net™ G5)を構成する制御コントローラをコンテナデバイス化し,ホストマシン上で現場のエンジニアリング設定に基づいたシステム構築や制御動作を再現可能な仮想化基盤技術を開発した。この基盤技術により,施工現場でのシステム立ち上げ前に,バックオフィスや工場でのステージング環境で制御動作を事前確認することができ,エンジニアリングの効率化や現場でのエンジニアリング品質の向上に加え,お客様のデジタルツイン環境と連携し机上の制御シミュレーション結果に基づいた新しい価値提案も期待できる。
1.はじめに
近年,ビルディングオートメーションシステムは,建物の効率的な運用や付加価値の向上において重要な役割を担っている。とりわけ,大規模施設や高度な自動制御を必要とする環境では,各種デバイスの連携や複雑な制御プログラムが求められるため,エンジニアリング作業は一層高度化・複雑化している。そこで,現場における作業効率の向上や,エンジニアリング品質の強化といった課題解決を目指し,仮想化技術を活用したsavic-net™ G5の仮想基盤技術を開発した。
本技術は,従来のエンジニアリングプロセスにおける制約を克服し,仮想環境上でのデバッグ,検証,調整を可能にすることで,作業効率の向上と現場での手戻り防止を実現できる。また,クラウド環境での運用に対応することで,関係者間での情報共有を強化し,エンジニアリングプロセス全体のデジタル変革を推進する。
本論文では,開発した仮想基盤技術の技術的背景,解決を目指した課題,特徴的な要素技術,および期待される効果について詳述する。
2.savic-net™ G5のシステム構成
弊社が提供するビルディングオートメーションシステム(以下,BAS)の主力製品である savic-net™ G5は,図1に示すような各種制御コントローラおよびネットワークデバイスによって構成されている。
savic-net™ G5システムにおける制御コントローラは,スーパーバイザリデバイスである統合コントローラ,アドバンストコントローラやジェネラルコントローラなどのプライマリデバイス,およびVAVコントローラやFCUコントローラに代表されるセカンダリデバイスに分類される。ネットワーク上には,統合コントローラが管理する履歴データを大容量で蓄積するためのネットワークアタッチドデバイスや,ビル制御のサブシステムを管理する他社製ネットワークデバイスが接続される場合もある。
savic-net™ G5に接続されるプライマリデバイスおよびセカンダリデバイスの台数は,建物の用途や顧客要求により異なる。大型建物や高度な自動制御を必要とする案件では,統合コントローラが最大20台,プライマリデバイスが1,000台規模となり,さらにプライマリデバイス1台あたりに最大70台のセカンダリデバイスが接続される場合もある。これらの制御デバイスは階層的に管理され,各種通信プロトコルを介してシステム全体として統合されている。
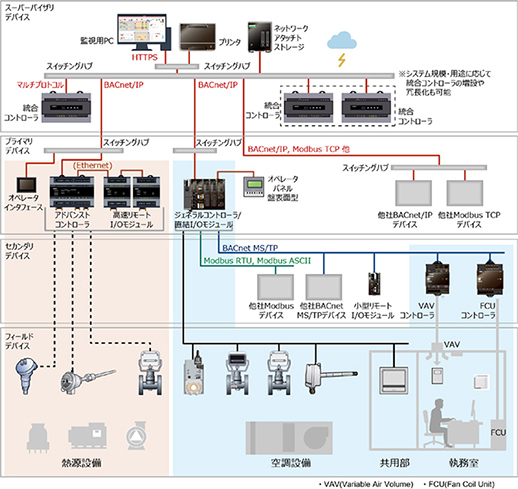
図1 savic-net™ G5システム構成図
3.エンジニアリング作業とその課題
システム構築に際しては,各建物の設備構成や監視・制御仕様に合わせて,統合コントローラ・プライマリデバイス・セカンダリデバイスに必要な制御プログラムの作成,デバッグ,機器パラメータ設定,通信アドレス設定などのエンジニアリング作業が必要となる。エンジニアリング作業は,一般的に図2に示すような3つのステップで実施される。
ステップ1:バックオフィスでの作業工程
顧客仕様に基づき,弊社のエンジニアリングツール PC Engineering Tool for savic-net G5(1)(以下,エンジニアリングツール)を用いて,統合コントローラ,プライマリデバイス,セカンダリデバイスのエンジニアリングデータを作成し,各デバイス単体での制御動作確認を行う。
ステップ2:工場でのステージング工程
工場側において,ステップ1で作成したエンジニアリングデータを用い,現場のシステム環境を再現したステージング環境でシステム全体の動作検証を実施する。検証完了後,調整済みのエンジニアリングデータが現場へ送付される。
ステップ3:現場調整工程
現場において,統合コントローラ,プライマリデバイス,セカンダリデバイスが稼働可能な段階で,順次エンジニアリングデータを書き込み,実際の設備機器との単体動作確認を行う。すべての実機が稼働可能となった時点で,システム全体としての制御動作確認を実施する。近年,深刻な人手不足が続く一方で,顧客からの制御要求は年々複雑化・高度化している。その結果,ソフトウェアの作成や制御デバッグに多くの時間と工数を要する状況となっている。この問題を解決するためには,現行のエンジニアリングプロセスにおける二つの課題を克服する必要がある。
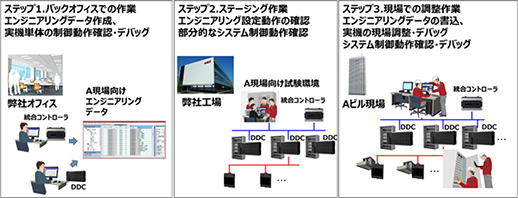
図2 エンジニアリングの全体フロー
3.1 工場ステージング作業における検証の限界
本来であれば,工場内に現場と同等規模のシステムを構築し,単体試験からシステム全体の制御動作までを事前に確認したうえで,検証済みのエンジニアリングデータを現場に送付することが理想である。しかし,使用可能な実機数や検証設備の設置スペースには制約があり,現場と同一規模のシステムを再現することは現実的に困難である。仮に同規模の環境を構築できたとしても,電源・配線・ネットワークなどの整備には多大な工数とコストを要する。そのため,実際の工場ステージングでは,システムを部分的に分割あるいは抜粋し,限られた実機環境を使い回して動作確認を行っている。しかし,この方法では,検証環境と実際の現場環境との間に差異が生じる可能性が高く,工場で正常に動作していた制御が現場では動作しないといった不具合を引き起こすリスクが存在する。
3.2 現場調整作業における手戻りリスク
システム全体で協調して実現する制御や,複数デバイス間でデータ連携を行う高度な制御の確認・デバッグは,現場に納入された実機がすべて稼働した後にのみ実施できる。このような後工程で不具合が発見された場合,修正には多大な手戻りが発生し,作業工数の増加だけでなく,担当者の身体的・心理的負担も大きくなる。さらに,システム全体の動作を確認するためには多くの関係者間での調整が必要であるが,全員を同時に現場へ集めることは難しく,調整作業の遅延につながる要因となっている。
4.エンジニアリング作業における課題解決の目標
前節で述べた二つの課題を解決するために,以下の価値提供を目指した。
4.1 「工場ステージング作業における検証の限界」の対応目標
本課題の解決策として,図3に示すようなすべての実機の設定および制御動作を1台のPC上で確認できるシミュレータ環境を構築することを目指した。これにより,検証用スペースおよび実機の準備台数を削減できるとともに,配線・立ち上げ作業も最小限に抑えられる。さらに,シミュレータ上で実施可能な検証項目を増やすことで,より安定した品質のエンジニアリングデータを現場へ提供できるようになる。ただ し,実際の入出力動作を確認するには実機による検証が必要な場合もある。そのため,ステージング環境においては,実機と仮想デバイスをシームレスに接続可能であることが必須要件となる。
4.2 「現場調整作業における手戻りリスク」の対応目標
本課題の解決策として,現場のシステム構成に即したシミュレータ環境を用い,早期段階から制御デバッグを実施可能とすることを目指した。これにより,システム全体の品質を安定的に確保し,現場での手戻りを最小化できる。さらに,シミュレータ環境を図4に示すようなクラウド上に構築し,リモートでの利用を可能とすれば,関係者が場所を問わず情報共有を行える。これにより,原因分析や修正方針の検討を迅速化し,作業効率の向上が期待できる。
これら二つの課題を解決するために求められるシミュレータ環境は,以下の要件1~5をすべて満たす必要がある。
- 要件1: 実機デバイスの動作を忠実に再現できること
- 要件2: 現場ネットワークを忠実に再現できること
- 要件3: 複数デバイスを同一シミュレータ環境上で再現できること
- 要件4: シミュレータ環境がオンプレミスおよびクラウドの両方に対応していること
- 要件5: 仮想デバイスと実機デバイスを混在させて動作可能であること
従来の仮想化技術では,要件1~3を完全に満たすことができなかった。そこで,これらの課題を克服し,現場構成に応じて savic-net™ G5システムを容易に再現可能とする「シミュレータ基盤技術」 を新たに開発した。
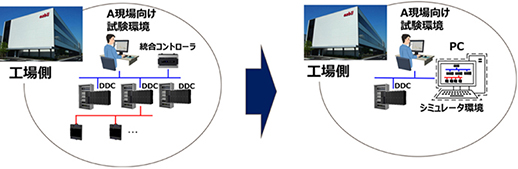
図3 「工場ステージング作業における検証の限界」の解決策
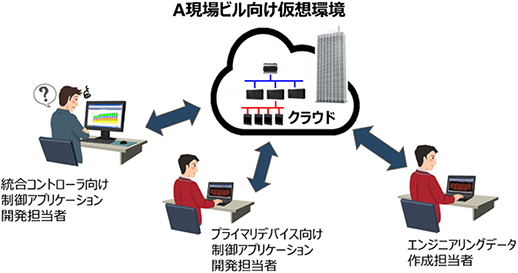
図4 「現場調整作業における手戻りリスク」の解決策
5.シミュレータ基盤技術「G5シミュレータ」
本技術「G5シミュレータ」は, 「3.エンジニアリング作業における課題解決の目標」で示した5つの技術要件をすべて満たすことができる。本章では,その中でも特に特徴的な3つの要素技術について,具体的な動作事例を基に説明する。
5.1 デバイスの完全再現化技術
現場で稼働している実機デバイスを仮想デバイスとして動作させるためには,「 物理世界での挙動」を論理的に再現する必要がある。ここでいう「物理世界での挙動」とは,図5に示すような実機内部の処理動作を指す。実機におけるこれらの重要な動作を仮想環境上で正確に再現することが,本技術「デバイスの完全再現化技術」である。従来の仮想化技術では,実機に搭載されたアプリケーションソフトウェアをクラウドやオンプレミスのホストPC上で動作させることが主であり,ハードウェアレベルの挙動再現は対象外であった。これに対し,本技術では「実機そのものをまるごと仮想化する」という新しい発想に基づいて開発を行った。しかし,実機の物理的挙動はハードウェアに強く依存しているため,その再現には多くの技術的課題が存在した。以下に,本技術の具体的な再現事例を示す。
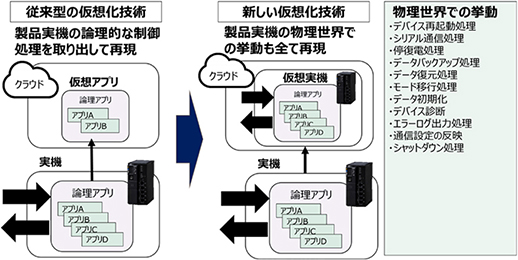
図5 従来型の仮想化技術と新しい仮想化技術の違い
5.1.1 デバイスの再起動処理の再現
実機デバイスでは,再起動の原因となる物理的事象によって初期化(イニシャル)動作が異なり,この動作は単体制御のみならずシステム全体の制御動作にも影響を与える。したがって,制御動作を網羅的に検証するためには,再起動要因となる物理事象を完全に再現する必要がある。仮想デバイスでは物理入力を直接検出できないため,ユーザが指定した物理入力を仮想的に与える機構を開発し,実機と同一のイニシャル動作を再現可能とした。
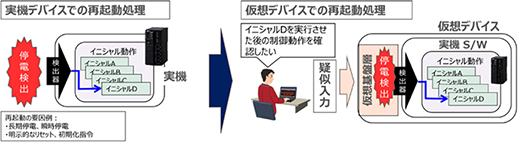
図6 デバイスの再起動処理の再現事例
5.1.2 セカンダリデバイスとの通信処理の再現
savic-net™ G5システムでは,IP通信に加え,特殊な物理層を介した通信が行われている。一方,仮想環境では物理層が存在しないため,すべてをIP通信上で再現する必要がある。そこで,本技術では,実機で行われるシリアル通信をIP通信上で仮想的に再現する仕組みを開発した。この方式は通信プロトコルに依存せず,特殊物理層を用いるあらゆるセカンダリデバイスとの通信に対応可能である。
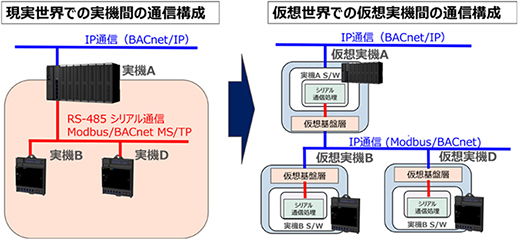
図7 セカンダリデバイスとの通信処理の再現事例
5.2 ネットワークの完全再現化技術
「ネットワークの完全再現化技術」は,現場の物理ネットワーク構成を仮想環境上で正確に再現する技術である。
実際の現場では,コントローラの設置環境や役割によってネットワークシステムが階層化され通信経路や順序も複雑である。本技術を用いることで,図8に示すようなフラットな仮想環境上においても,物理ネットワークの階層構造,通信経路,通信順序を忠実に再現することができる。
本技術の動作事例として,「VAVコントローラのエンジニアリング」を以下に示す。現場では,図9に示すようにVAVコントローラとDDC(Direct Digital Controller)は特殊物理層の通信方式で接続されており,PC上のエンジニアリングツールからVAVコントローラへはDDCを経由してアクセスしている。本技術を適用することで,仮想環境上でも現場と同一のツールを使用してエンジニアリングおよび調整作業を実施でき,仮想環境で設定ミスを事前に検出することが可能となる。さらに,エンジニアリング後のDDC-VAV間通信による制御動作も仮想環境上で確認できるため,現場での手戻り防止に寄与する。
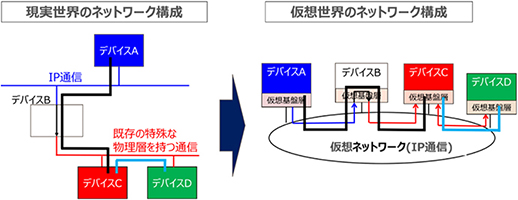
図8 ネットワークの再現化技術の概念
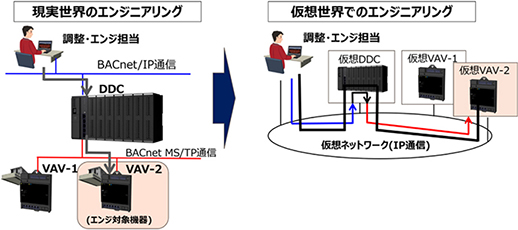
図9 VAVコントローラのエンジニアリングの再現事例
5.3 マルチデバイス動作技術
「マルチデバイス動作技術」は,大量の仮想デバイスをホストマシン上で同時動作させるための技術である。システムを構成するすべてのデバイスを仮想化して同時稼働させるためには,CPUやメモリなどのリソース消費を最小限に抑えることが重要となる。
例えば,弊社が受注した超大規模案件では,プライマリデバイスおよびセカンダリデバイスを合わせて約10,000台の実機デバイスが稼働している。従来の仮想化技術では,一般的なPC環境で動作可能なデバイス数は約10台にとどまり,全システムを仮想化するには1,000台以上のPCが必要となる試算であった。
これに対し本技術では,大量の仮想コントローラを効率的に動作させるための新しいコンテナ型仮想化技術を利用した開発を行った。従来方式ではデバイスごとにOSが稼働しリソースを消費していたが,本技術では,図10に示すようにOSを統合化することでCPU・メモリの使用量を大幅に削減し,1台のPCで最大1,000台の仮想デバイスを同時に動作させることを可能とした。
この技術を実現するためには,実機で動作しているソフトウェアをLinuxコンテナとして動作させる必要があった。特にプライマリデバイスでは,組み込み機器に特化したリアルタイムOS(RTOS)上で動作するアプリケーションおよび通信プロトコルスタックを,Linux環境上で再現することが課題であった。
本技術では,図11に示すようにLinux上でITRON仕様に準拠したリアルタイム動作を可能とするエミュレータを活用し,実機と同等のタスクディスパッチおよび割り込み処理を再現した。さらに,専用通信スタックとの互換性を確保するため,通信プロトコルを中継する「ブリッジプログラム」を新たに開発し,実機同様の通信処理を実現した。
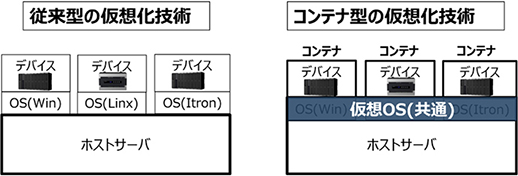
図10 従来型の仮想化技術とコンテナ型の仮想化技術の違い
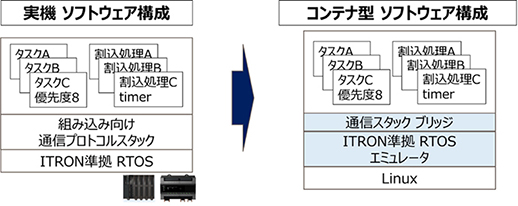
図11 開発したコンテナ型のソフトウェア構成
6.「G5シミュレータ」導入による効果
本技術の導入により,以下の技術的効果及び業務改善効果が期待される。
(1)バックオフィスにおけるデバッグ作業の効率化
実機を物理的に使用せず,仮想環境内で複数系統の制御デバッグ作業を同時に実行することが可能となり,デバッグ作業全体の効率化を実現する。
(2) 工場における作業コストの削減および検証環境の省スペース化
仮想ステージング環境において,従来は実機で確認する必要のあったシステム制御動作を確認できるようになり,実機の立ち上げやネットワーク配線にかかる作業コストの最小化および検証環境の省スペース化が達成される。
(3) 現場調整前の事前確認による品質向上および手戻りの防止
バックオフィスや工場においては確認できなかった複雑で高度なシステム制御やデバイス間の連携動作を,現場での調整作業前に仮想環境内で確認することができ,安定した品質の作り込みが可能となる。これにより,後工程における現場での手戻りを効果的に防止する。
(4) クラウド環境におけるシステムの可視化および利害関係者間の情報共有の強化
仮想システムをクラウド環境上で可視化できることにより,地理的な制約を受けることなく,関係者間でシステム情報の共有が容易となる。これにより,利害関係者間での情報共有が一層強化され,問題解決の迅速化が期待される。
7.今後の目標
本技術は,エンジニアリングにおける課題解決を目的とするだけでなく,BIM(Building Information Modeling)データを活用したデジタルツイン技術の中核基盤として,更なる発展が期待される。お客様のビルの設備構成情報を基にシミュレーションを行う「設備シミュレータ」や,ビルの室内環境を再現する「室内シミュレータ」との連携により,空調設備や熱源設備の構成に基づいて,消費電力やゾーンごとの熱 負荷を予測・計算することが可能となる。また,ビルの設計図や躯体情報を基に,室内の気流や温度分布を再現することも可能となり,これにより建物全体のデジタルツインを実現するためのシミュレーション基盤の構築が期待できる。このデジタルツイン環境を活用することで,ビル全体の現在の制御状態の可視化に加え,ビル固有の構成に基づいた高精度なシミュレーション結果による将来の制御予測も可能になるのではないかと考えている。
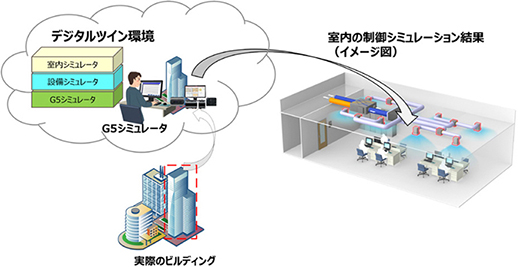
図12 デジタルツイン環境への活用
8.おわりに
本論文では,savic-net™ G5システムに基づく仮想化技術「G5シミュレータ」の技術的背景や具体的な特徴を示し,エンジニアリング業務における課題解決にどのように貢献できるかを説明してきた。G5シミュレータは,デバイスの再現性,ネットワークの仮想化,複数デバイスの動作シミュレーションを実現する新しい仮想化基盤技術であり,お客様の施設に合わせたシミュレーション環境との柔軟な連携が可能である。この技術を活用することにより,より多様なシステムとの統合が進み,お客様のビル環境における高精度なシミュレーションを実現し,お客様の課題解決に貢献できることを期待している。
<参考文献>
(1) 小柳貴義, 勝見智行 他:ビルディングオートメーションシステムのエンジニアリング作業効率化に貢献する新しいエンジニアリングツール, azbil Technical Review, 2017年, pp. 51-56, アズビル株式会社
<商標>
savic-netはアズビル株式会社の商標です。
BACnetはASHRAEの商標です。
Ethernetは,富士フイルムビジネスイノベーション株式会社の登録商標です。
Modbus is a trademark and the property of Schneider Electric SE,its subsidiaries and affiliated companies.
Linuxは,Linus Torvalds の米国およびその他の国における登録商標または商標です。
ITRONは,Industrial TRONの略称です。TRONは,The Real-time Operating system Nucleusの略称です。
<著者所属>
東出 功一 アズビル株式会社 ビルシステムカンパニー開発本部開発2部
この記事は、技術報告書「azbil Technical Review」の2026年04月に掲載されたものです。